Современные наукоемкие технологии и перспективные материалы текстильной и легкой промышленности - А.Г.Печникова
Исследования показали, что точность позиционирования
промышленного робота (ПР) зависит не только от конструкции ПР и его захватного
устройства (ЗУ), но и от условий функционирования системы ПР-ЗУ- объект захвата
(ОЗ). Т.к. ПР является разомкнутой системой, то при функционировании системы
ПР-ЗУ-ОЗ в пространстве на точность позиционирования влияет колебание системы.
Для устранения влияния колебания в конструкцию ПР изготовлен
и введен пружинный гаситель (см. рис. 1).
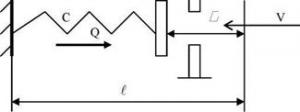
 Рис. 1. Схема пружинного гасителя колебаний.
Рис. 1. Схема пружинного гасителя колебаний.
При соударении манипулятора ПР с пружиной кинетическая
энергия манипулятора ПР превращается в потенциаль-
ную энергию пружины. Связь между этими энергиями представляется
уравнением: —2— = ^ , где т - масса манипулятора ПР, V - скорость манипулятора ПР, С
- коэффициент жесткости материала гасителя колебаний, Ь - длина хода манипулятора ПР, О
- начальная деформация пружины гасителя, /
- длина пружины в исходном положении. После преобразований для определения
максимальной силы (0, оказывающего сопротивление о стенку-ограничитель, и
эффективности демпфирования (□) удара манипулятора имеем:
Для разработанного пружинного гасителя, известны масса
манипулятора ПР и скорость удара его. Из параметров С, Ь, Q известен один, лишь поэтому вычисления двух
неизвестных параметров составлена программа для ЭВМ на «Бейсик». Например, при
заданных т = 0,102 кГс с2/м; V = 5,0 м/с; Q = 500 кГс имеем: С = 9,8 кг/см и Ь
= 0,51 м.
Из приведенного примера
следует, что при заданных значениях системы ПРУЖИННЫЙ ДЕМПФЕР- МАНИПУЛЯТОР
ПР-ЗУ-ОБУВНАЯ КОЛОДКА для того, чтобы система в период окончания движения
мгновенно остановилась в заданном положении, необходимо, чтобы величина
жесткости пружины демпфера составляла 9,8 кг/см, а длина хода манипулятора ПР
- 0,51 м.



 374
374 



